Malo Kerebel
Étudiant en physique
Étudiant en physique
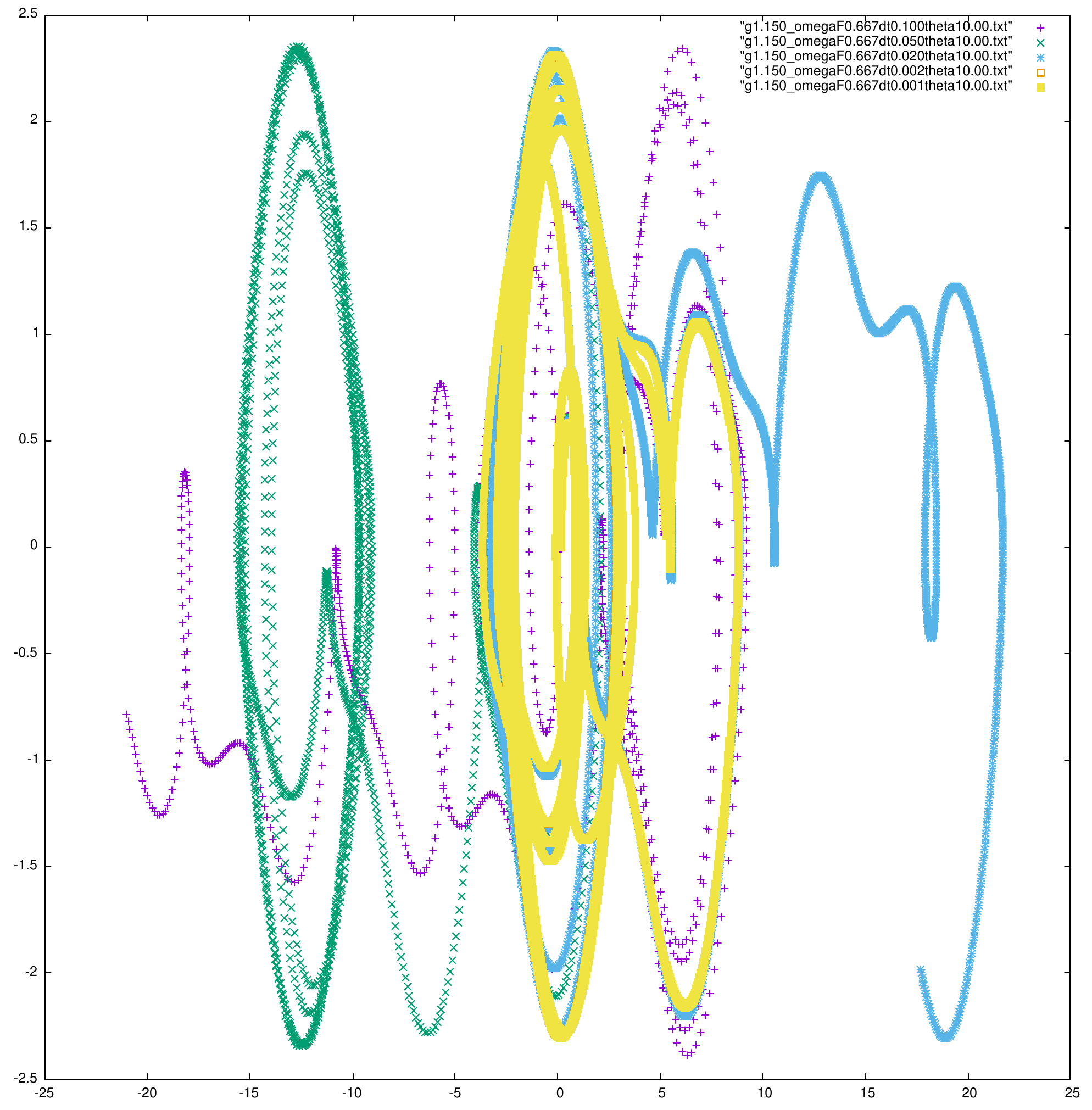
On peut s'intéresser à plusieurs scénarios, Dans un premier temps on s'intéresse à l'effet du pas de temps sur le système. Dans le diagramme de phase suivant, on place 5 système à des conditions initiales équivalentes, avec \( g = 1.15\), \(q = 2\), \(\omega_F = 2/3\), \(\theta = 10^o\), \(\phi = 0\), \(\omega = 0\), le seul paramètre qui change est le pas de temps, allant de \( 0.1s/points\) à \(0.001s/points\) :
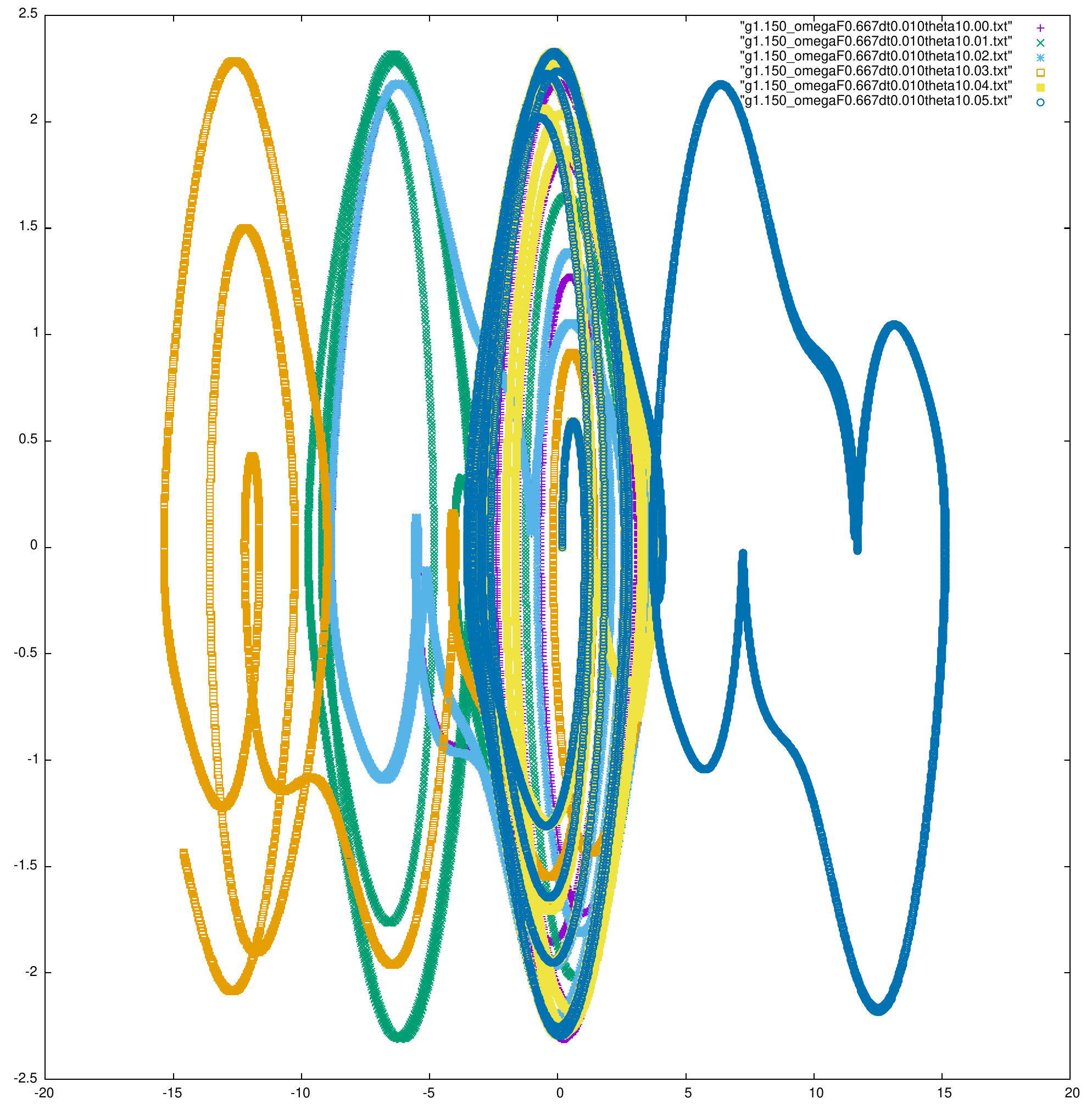
On s'intéresse maintenant, à l'effet du changement de \(\theta\) sur l'évolution du système, on prend donc des constantes équivalentes pour 6 systèmes, c'est à dire : \( g = 1.15\), \(q = 2\), \(\omega_F = 2/3\), \(\mathrm{d} t = 0.01s/points\), \(\phi = 0\), \(\omega = 0\). La seule différence entre les systèmes est le \(\theta\) initial qui a une différences de \(0.01^o\) entre chaque pendule :
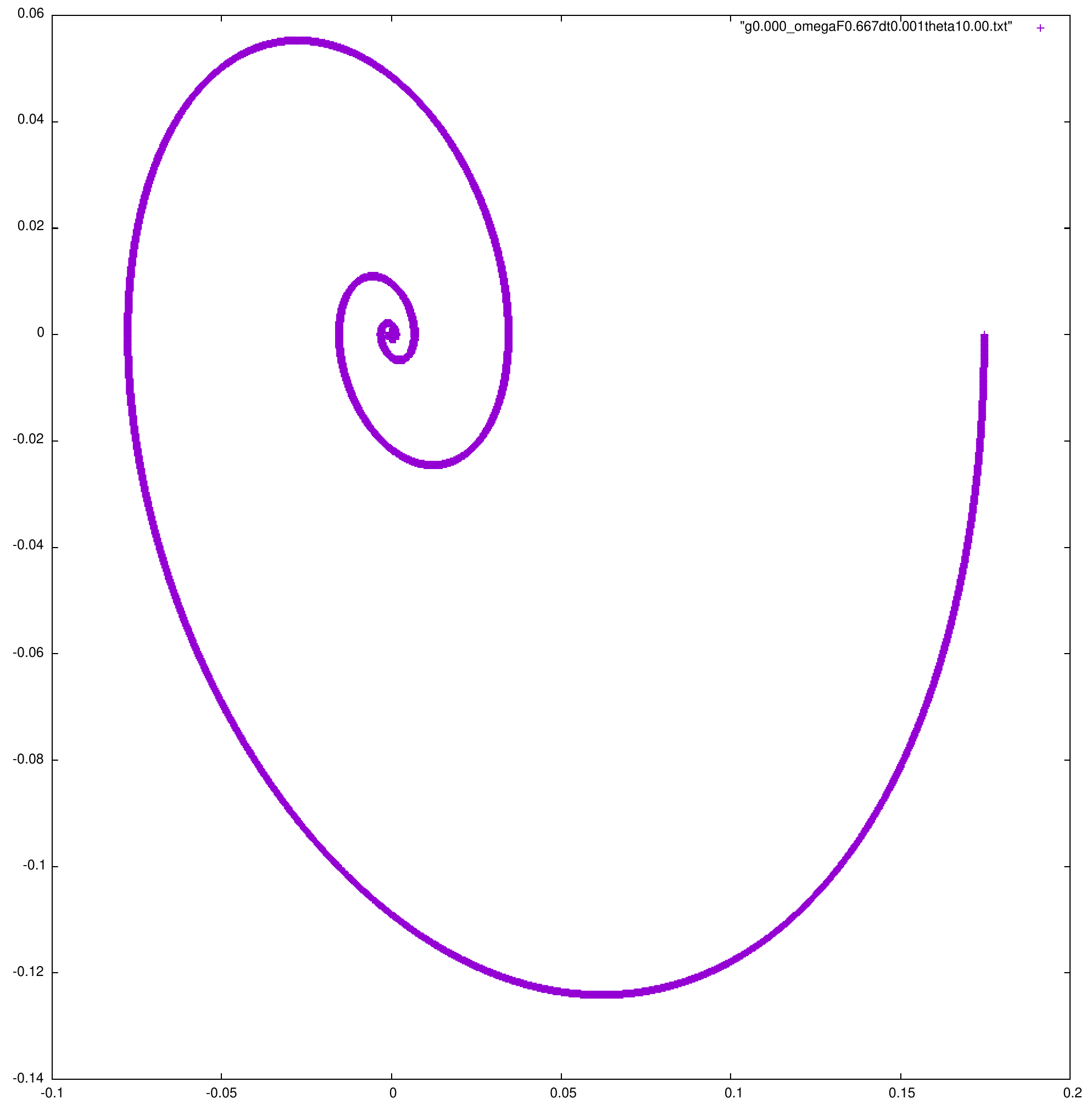
On peut désormais se mettre dans le cas \(g = 0\), avec les mêmes conditions initiales qu'auparavant, c'est à dire : \( q = 2\), \(\omega_F = 2/3\), \(\mathrm{d} t = 0.01s/points\), \(\theta = 10^o\), \(\phi = 0\), \(\omega = 0\)
On se place désormais, dans des cas avec \(g = 1.03\) et \(g = 1.04\) (avec les mêmes autres conditions initiales \( q = 2\), \(\omega_F = 2/3 \), \( \mathrm{d} t = 0.01s/points \), \( \theta = 10^o\), \(\phi = 0\), \(\omega = 0\).
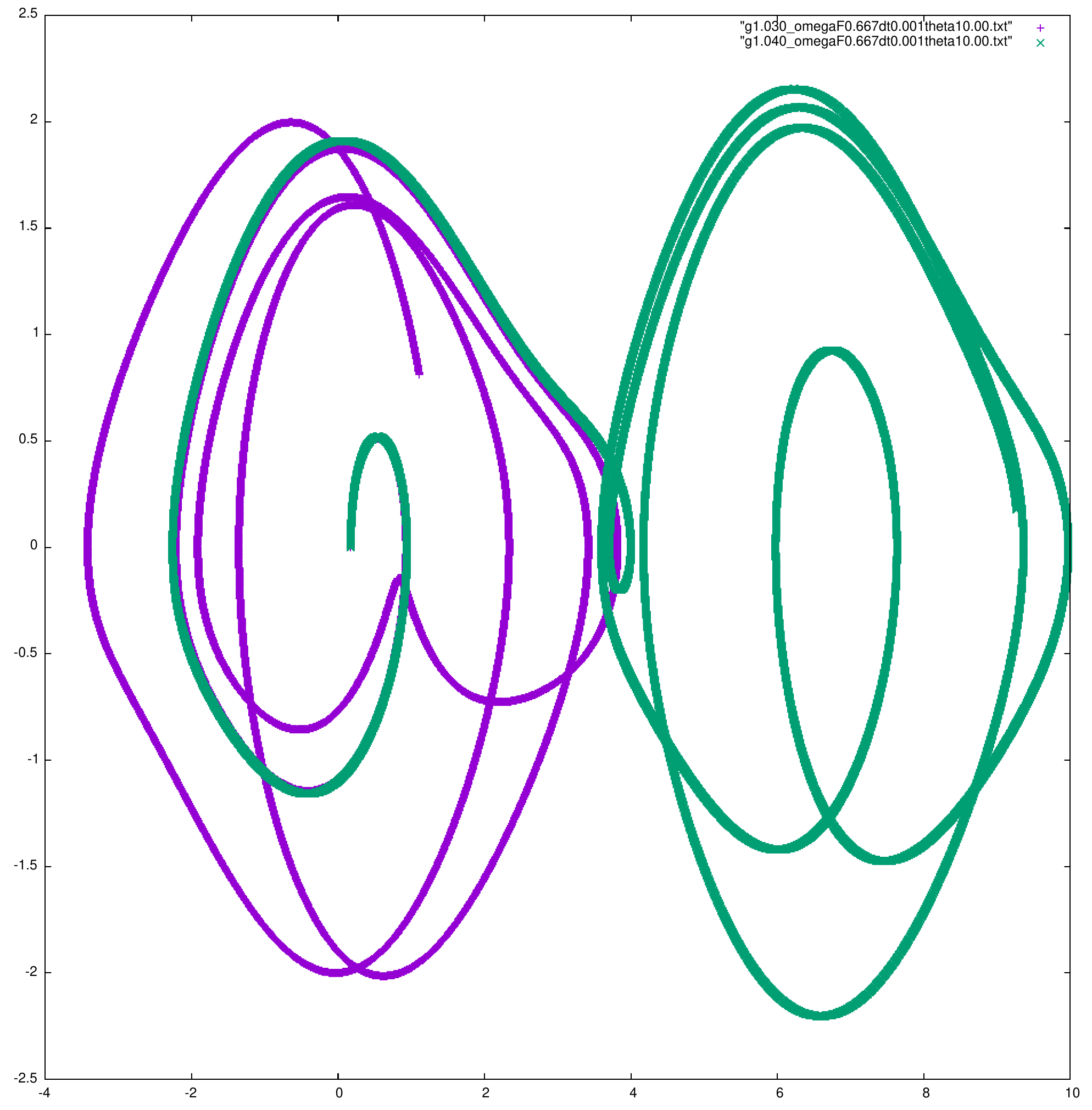
On voit que seul le cas \(g = 1.04\), on a la possibilité d'avoir un \(\theta > \pi \). On a donc dans le pendule qui fait un tour entier, on a donc un doublement de période.
On voit donc que le pendule amorti et forcé, comme le double pendule, est un système chaotique, de petites variations des conditions initiales mènent à des résultats drastiquement différents. Que ce soit la valeur de \(g\) choisie, la valeur de \(\theta\) choisie ou la valeur de \(\mathrm{d} t\) choisie.